Detection
Evaluating bounding-box detection with `DetectionScorer` — metrics, thresholds, and the bbox editor hand-off.
Detection is Evaluar's most-exercised modality. It uses DetectionScorer (src/evaluar/scoring/detection.py:37) plus the bbox editor for visual inspection.
A minimal detection suite
from evaluar.api import detection, suite
def my_detector(image_url: str) -> dict:
return {"prediction": [...]}
def build_suite(sample_ids=None, config=None):
pipeline = (
detection("my_detector")
.callable(my_detector)
.inputs({"sample_001": {"image_url": "..."}})
.ground_truth({"sample_001": {"objects": [
{"label": "table", "bbox": [100, 100, 400, 300]},
]}})
.default_mapping()
.build()
)
s = suite(sample_ids=sample_ids or ["sample_001"], suite_name="detection_eval")
s.add_pipeline("my_detector", pipeline)
return sdetection("model_id") is a convenience wrapper for PipelineBuilder.for_task("detection", "model_id"). It installs DetectionScorer with default thresholds; everything else is the standard builder chain.
Canonical prediction shape
After normalization, predictions must conform to the detection schema (src/evaluar/schemas/predictions.py):
{
"objects": [
{"label": "table", "bbox": [x_min, y_min, x_max, y_max], "score": 0.92, "class_id": 0},
...
]
}label is required; score is required for AP-style metrics; class_id is optional.
Ground truth shape
Detection ground truth uses a similar shape, without the score:
{
"objects": [
{"label": "table", "bbox": [x_min, y_min, x_max, y_max]},
...
]
}Typed constructors are available in evaluar.schemas:
from evaluar.schemas import GTDetection, GTDetectedObject
gt = GTDetection(
sample_id="sample_001",
objects=[GTDetectedObject(label="table", bbox=[100, 100, 400, 300])],
)Metrics
The detection scorer composes the metric functions from src/evaluar/metrics/__init__.py:
| Metric | Function |
|---|---|
| Mean Average Precision (averaged IoU thresholds) | compute_map, compute_dataset_map |
| AP at a single IoU | compute_ap, compute_dataset_ap (e.g. map_50) |
| Confusion matrix | compute_confusion_matrix |
| Detection match table | match_detections |
| IoU helpers | compute_iou, compute_iou_matrix |
| Aggregate stats | compute_detection_metrics, DetectionMetrics |
Per-metric thresholds are declared on DetectionScorerConfig. Defaults:
thresholds = {
"map": MetricThreshold(pass_floor=0.70, warn_floor=0.50),
"map_50": MetricThreshold(pass_floor=0.80, warn_floor=0.60),
}Tuning thresholds in YAML
thresholds:
map_50:
pass_floor: 0.7
warn_floor: 0.6
precision:
pass_floor: 0.85
warn_floor: 0.65
recall:
pass_floor: 0.7
warn_floor: 0.6
gated_metrics:
- map_50
- precision
- recall
per_class_gated: trueThis is the literal shape used in evaluar/configs/floor_plan_model.yaml.
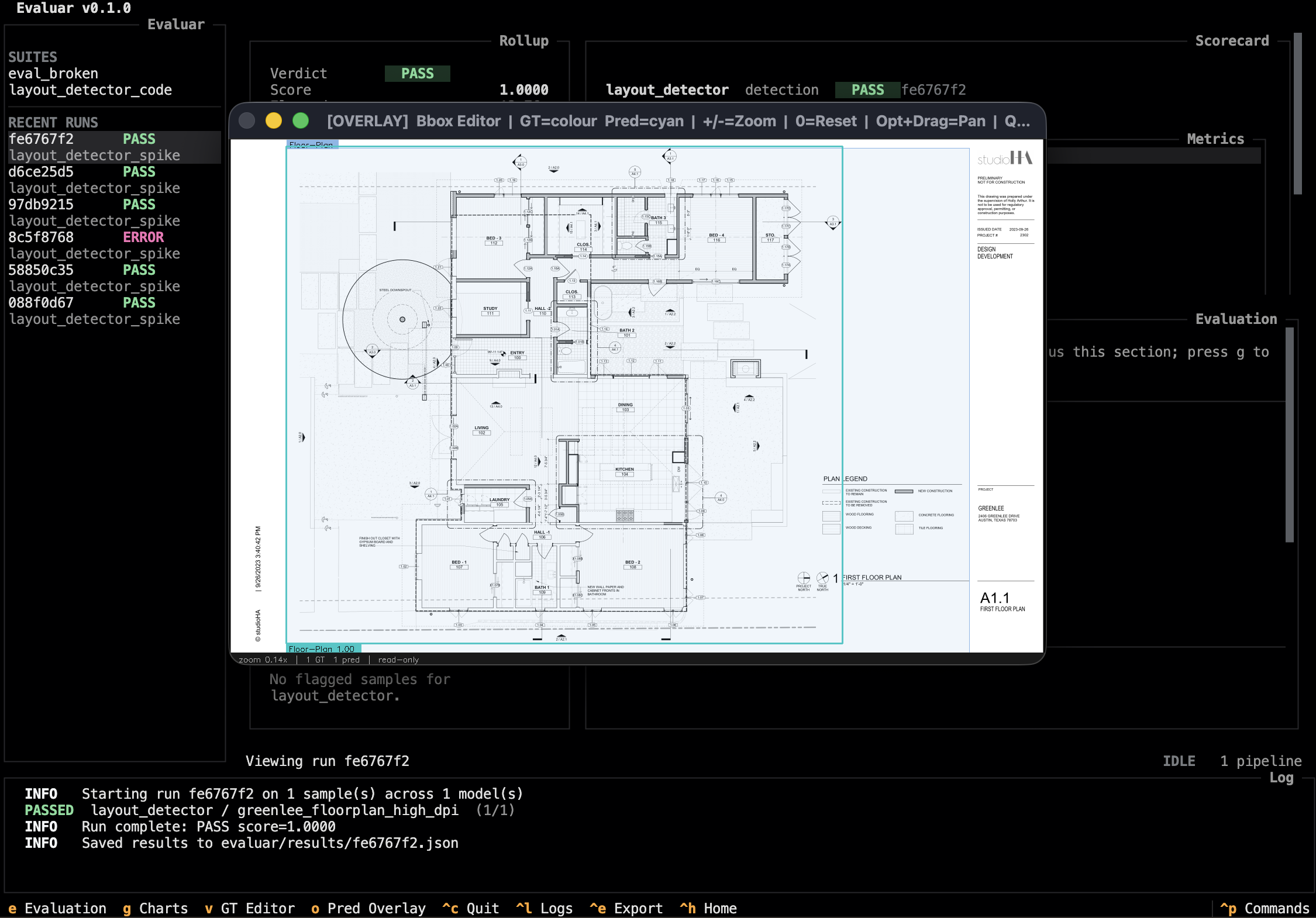
Inspecting failures visually
Detection failures are almost always faster to diagnose visually than numerically. After a run, open it in the TUI, jump into the failure inspector with i, then press o to launch the bbox editor in overlay mode.
If a sample's ground truth is wrong, press v instead — same window, edit mode. See Bbox editor for the complete keymap and the architectural reason it's a subprocess.